Übersetzungen dieser Seite?:
- Deutsch (de)
- English (en)
Die üppige Vegetation hier in Thailand ist der Wärme aber auch den teils heftigen Niederschlägen geschuldet. Die Temperaturen bewegen sich immer im Bereich von +25…35°C und lassen so keinen Sommer oder Winter erkennen. Schön ist das hier zu sehen. Die eigene Temperaturaufzeichnung in Home Assistant bestätigt auch die hohe Luftfeuchtigkeit.
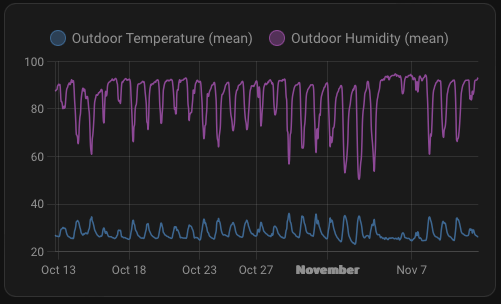
Die Jahresregenmenge kann bis zu 1600 mm/m2 (1mm = 1 Liter) betragen. In Deutschland ist es je nach Region weniger als die Hälfte. Die beiden folgenden Diagramme machen das deutlich:

Allerdings erfassen wir bisher nicht die wirkliche Regenmenge auf unserem Grundstück. Ein Grund genug für ein neues Projekt…
Es gibt eine große Menge an Regensensoren die allerdings nur erkennen ob es gerade regnet. Das kann hilfreich um automatisch zum Beispiel eine Markise ein- oder auszufahren. Wir wollen aber die Regenmenge messen. Daher brauchen wir einen Sensor, der die Regenmenge definiert auffängt. Dazu gibt es in Wikipedia gute Informationen über das Prinzip.
Ein digitaler Niederschlagsmesser verwendet einen Trichter um das Regenwasser zu bündeln und um es dann auf eine Kippwaage zu leiten. Ist die eine Seite vollgelaufen dann kippt die Waage, entleert die vollgelaufene Hälfte und die zweite Seite kann voll laufen. Zählt man die Anzahl der Kippvorgänge hat man ein gutes Maß für die Regenmenge. Natürlich muss das Maß für den Trichtereinlass sowie die Aufnahmemenge der Kippwaage bekannt sein. Genau solch einen Sensor kann man auch selber bauen. Hier ist ein gutes Beispiel mit 3D Druck. Es gibt diese Art Sensoren aber auch fertig als Zubehörteil für proprietäre Wetterstationen. Ein Anbieter ist TFA Drostmann:

Der Sensor ist batteriebetrieben und sendet die Messwerte auf 433MHz. Er kann also irgendwo draussen im Garten positioniert werden. Um den Sensor für eigene Anwendungen wie Home Assistant verwenden zu können bedarf es etwas Reverse Engineering. Das Trichtergehäuse läßt sich einfach entfernen. Zum Vorschein kommt die Kippwaage mit dem dahinter liegenden Gehäuse für die Elektronik. Ein Magnet in der Kippwaage stimuliert einen Reedkontakt im Innern. Das Batteriefach (2xAA) ist von unten zugänglich.

Im Innern residieren zwei Platinen. Eine mit dem Reedkontakt und COB (Chip On Board) und das zweite PCB ist der Sender (433MHz)


Diese Trennung erlaubt uns einfach das Protokoll zum Sender abzugreifen.
Im Batteriefach gibt es eine Triggertaste, die den aktuellen Messwert sofort sendet. Praktisch für die Aufzeichnung mit einem Logicanalyzer, dann braucht man nicht bis zum nächsten Frame zu warten. Zunächst fällt auf, dass das Protokoll anscheinen 8 mal wiederholt ausgegeben wird mit einer Pause von ca. 9ms dazwischen.

Zoomt man weiter hinein dann zeigt der SALEAE Logic Analzer ein ASK (Amplitude-Shift Keying) Protokoll. Zwischen einem immer gleich langen Highpuls von ca. 488µs kommen zwei Arten von Pausen: eine 2ms lang und die andere 4ms.

Schauen wir uns nun mal an, was dann wirklich gesendet wird.
Eine preiswerte Möglichkeit für Untersuchungen im Frequenzbereich so bis ca. 1766 MHz ist ein Software Defined Radio (SDR). Das reicht für die 433MHz des Regensensors völlig aus. Als Hardwarebasis dient ein 'alter' DVB-T Stick sofern er den Chipsatz RTL2832U+R820T2 beinhaltet. Der lässt sich nämlich frei programmieren. Ich habe mich für das Set von DollaTek entschieden, was für ca. 25,- € im Online-Markt der Wahl zu beschaffen ist.

Die Fernbedienung und auch die Treiber-CD brauchen wir nicht, Antenne und der Stick reichen für die weiteren Untersuchungen aus. Der Stick wird in gängigen PCs automatisch erkannt. Alle weiteren Untersuchungen wurden unter OSX ausgeführt, dürften ähnlich aber auch Windows funktionieren.
Für den Stick brauchen wir nun die richtige Analyse-S/W. Unter SDR software for Windows Linux Mac OS & drivers RTL-SDR gibt es eine übersichtliche Aufstellung. Bei OSX bieten sich da folgende Programme an:
Sie sind alle kostenlos und Open Source. Für meine Untersuchung habe ich URH verwendet, da es alle Analyzeschritte in einem Programm vereint. Zuerst schauen wir uns erstmal das Frequenzspektrum um 433MHz herum an, ob tatsächlich ein Signal vom Regensensor gesendet wird. Dazu starten wir im URH die Funktion Spectrum Analyzer… und triggern den Sendeframe durch Drücken der Taste im Batteriefach. Vor dem Start der Messung muss man noch das Device auswählen, in unserem Fall der USB Stick RTL-SDR. Das Ergebnis zeigt tatsächlich bei ca. 433.95MHz ein Sendesignal.

Im blauen Block ist der zeitliche Verlauf aufgezeichnet (x=Frequenz, y=Zeit) und die Farbe gibt die Signalintensität an (je wärmer um so stärker). Darüber ist der Amplitudenverlauf über die Frequenz aufgetragen. Mit der Erkenntnis können wir das Signal nun aufzeichnen und weiter untersuchen. Dazu rufen wir die Funktion Record Signal… auf. Dann wieder das Device auswählen und die Frequenzen passend einstellen:


Das Ergebnis zeigt nun das aufgezeichnete Signal im zeitlichen Verlauf. Wir erkennen die sich achtmal wiederholenden Frameanteile und im Zoom die schon im digitalen Signal vorher beschriebenen Pulse und Pausen. Diese Aufzeichnung speichern wir an einer wiederzufindenen Stelle ab.
Jetzt ist es an der Zeit in URH ein neues Projekt anzulegen damit wir die nächsten Schritte auch abspeichern können. Dann gehen wir auf den Reiter Interpretation und laden das aufgezeichnete Signal. Jetzt können wir dieses Signal 'interpretieren' (lassen). Dazu stellen wir die Modulation auf ASK, die Anzahl der Samples/Symbol auf z.B. 500. Unten wurde das Signal jetzt in einen Bitstrom umgewandelt. Jede Highamplitude wird zur 1 und die Pausen dazwischen zu 0 gesetzt:
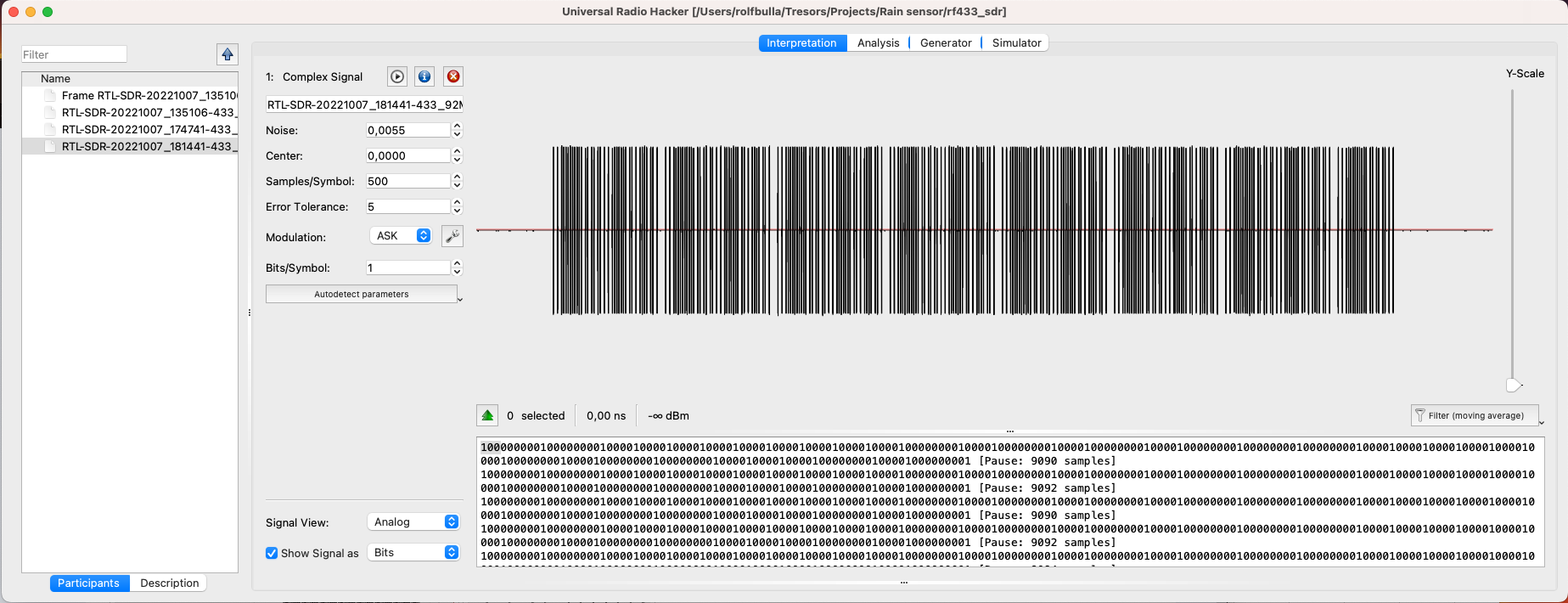
Auch hier ist wieder die Pulsfolge mit den zwei unterschiedlich langen Pausen zu finden 100000000100000000100001000010000100001…. Um das Signal zu decodieren gehen wir auf den Reiter Analysis und definieren unter Decoding ein neues Decoding Format mit dem Namen z.B. PDM:


Um die vorhandene Decoderoption Morse Code nutzen zu können, invertieren wir das Signal vorher mit Invert. Dann müssen wir noch die Morsecode Parameter festlegen. Nach der Invertierung haben wir genau eine NULL und dann entweder 4 oder 8 Einsen:
Wenn alles richtig eingestellt ist, wird der Frame ohne Fehler decodiert. Die 8 Frames erscheinen jetzt in der Liste. Jeder Frame besteht aus 36 Bits deren Bedeutung wir nun empirisch herausfinden müssen. Dazu legen wir einen neuen Message Type Rain_Sensor an. Nun können wir die Bits passend gruppieren und der jeweilige Wert wird sofort in der Spalte Value angezeigt. In der Frametabelle kann man sehen, dass der 6. gesendete Frame korrumpiert ist und der 8. nicht mehr vollständig gesendet wurde. Da aber die Daten einer Sendesequenz immer alle gleich sind, reicht ein einziger korrekter Frame aus 36 Bytes. Für die Gruppierung findet man im Netz einige typische Beispiele die man als Startvorlage nehmen kann. Das Ergebnis der iterativen Dekodierung hier nochmals zusammengefasst:
Frame: 0000 0000 0011 1111 1111 2222 2222 2233 3333 0123 4567 8901 2345 6789 0123 4567 8901 2345 |----|----|----|----|----|----|----|----|---- aaaa aaaa RRbs tttt tttt tttt rrrr rrrr CCCC LSB - MSB LSB ------ MSB LSB - MSB a: 8 bit address id (random after battery change) b: 1 bit battery state 0 == OK s: 1 bit force TX switch 1 == switch pressed R: 2 bit MSB of rain value t: 12 bit signed temperature * 10 (eg: 23,1°C send as 231) r: 8 bit LSB of rain value C: 4 bit checksum of 8 nibbles send
Mit der Erkenntnis kann es nun an den neuen Empfänger gehen, der in Home Assistant integrierbar ist.
Um an das Signal des Regenmengensensors zu kommen brauchen wir zuerst einen passenden Empfänger für 433MHz. Die gibt es vielfältig im Online-Handel. Bei der Auswahl ist darauf zu achten, dass es sich um einen Superhet- (Superheterodyne) und nicht um einen Geradeausempfänger handelt. Geradeausempfänger haben eine zu große Bandbreite und eine geringe Verstärkung. Meine Wahl fiel auf den DollaTek RXB6 Superheterodyne Receiver:


Bei der Bestellung gleich die passende 433MHz Helical-Antenne mit ordern.
Das Empfängermodul arbeitet mit 5V Versorgungsspannung und stellt einen digitalen Ausgang zur Verfügung, der direkt mit einem ESP Modul verbunden werden kann. Hier meine Lösung auf einer Rasterplatine mit ESP8266 Modul, dem Empfänger RXB6 und einem Micro-USB Anschluss. Da wir im Haus an allen Steckdosen auch 5V USB Buchsen haben, können wir auf ein externes Netzteil verzichten.

Jetzt geht es an die Software. Für die Integration in Home Assistant bietet sich wieder ESPHome und ein custom component an. Das folgende C-Programm erledigt die Auswertung und stellt vier Sensoren zur Verfügung:
Der Pin an dem der Empfängerausgang angeschlossen ist wird über #define RX_PIN 3 definiert. Jede Pegeländwerung an diesem Pin generiert einen Interrupt, der das bekannte Protokoll mit einer Statemachine on-the-fly auswertet. Die Impulse der Kippwaage müssen noch mit 0.5 multipliziert werden, da ein Impuls 0.5mm/m2 Regenmenge entspricht.
In ESPHome generieren wir ein neues Device und fügen den eigenen Code mit einem includes: hinzu. Das File rf433_rain_sensor.h muss dazu in /config/esphome kopiert werden.
esphome: name: rain-sensor includes: - rf433_rain_sensor.h
Dann definieren wir die vier Sensoren gemäß dem folgenden Beispiel.
sensor: - platform: custom lambda: |- auto rf433_sensor_data = new RF433_Rain_Sensor(); App.register_component(rf433_sensor_data); return {rf433_sensor_data->temp_sensor, rf433_sensor_data->rain_sensor}; sensors: - name: "Rain Temperature Sensor" unit_of_measurement: °C accuracy_decimals: 1 - name: "Rain Sensor" unit_of_measurement: mm accuracy_decimals: 1 - platform: custom lambda: |- auto id_rf433_sensor_data = new ID_RF433_Rain_Sensor(); App.register_component(id_rf433_sensor_data); return {id_rf433_sensor_data}; sensors: - name: "ID Rain Sensor" unit_of_measurement: "" accuracy_decimals: 0 binary_sensor: - platform: custom lambda: |- auto batt_rf433_rain_sensor = new Batt_RF433_Rain_Sensor(); App.register_component(batt_rf433_rain_sensor); return {batt_rf433_rain_sensor}; binary_sensors: - name: "Lowbat Rain Sensor"
Nach der Integration stehen die Daten nun im Home Assistant zur Verfügung. Die gemessene Regenmenge wird vom Sensor akkumuliert übertragen. Ob und wann der Zähler wieder zurückgesetzt muss ein Langzeitbetrieb zeigen. Maximal kann dieser Zähler (210) bis 512mm/m2 erfassen. Der Betrieb wird es zeigen…
Im Haus getestet funktioniert die Übertragung völlig problemlos. Ein längerer Ausseneinsatz steht noch aus, da sich das Gerät im Moment in Deutschland befindet. Ich werde diesen Part in 2023 ergänzen…
Wenn ihr meine Arbeit unterstützen wollt, so könnt ihr mir gerne einen Cappuccino oder so spenden: .
